---
title: Multi-platform
description: Building for multiple operating systems and architectures
keywords: >-
build, buildkit, buildx, guide, tutorial, multi-platform, emulation,
cross-compilation
---
{% include_relative nav.html selected="8" %}
Up until this point in the guide, you've built Linux binaries. This section
describes how you can support other operating systems, and architectures, using
multi-platform builds via emulation and cross-compilation.
The easiest way to get started with building for multiple platforms is using
emulation. With emulation, you can build your app to multiple architectures
without having to make any changes to your Dockerfile. All you need to do is to
pass the `--platform` flag to the build command, specifying the OS and
architecture you want to build for.
The following command builds the server image for the `linux/arm/v7` platform:
```console
$ docker build --target=server --platform=linux/arm/v7 .
```
You can also use emulation to produce outputs for multiple platforms at once.
However, the default build driver doesn't support concurrent multi-platform
builds. So first, you need to switch to a different builder, that uses a driver
which supports concurrent multi-platform builds.
To switch to using a different driver, you're going to need to use the Docker
Buildx. Buildx is the next generation build client, and it provides a similar
user experience to the regular `docker build` command that you’re used to, while
supporting additional features.
## Buildx setup
Buildx comes pre-bundled with Docker Desktop, and you can invoke this build
client using the `docker buildx` command. No need for any additional setup. If
you installed Docker Engine manually, you may need to install the Buildx plugin
separately. See
[Install Docker Engine](../../engine/install/index.md) for instructions.
Verify that the Buildx client is installed on your system, and that you’re able
to run it:
```console
$ docker buildx version
github.com/docker/buildx v0.10.3 79e156beb11f697f06ac67fa1fb958e4762c0fab
```
Next, create a builder that uses the `docker-container`. Run the following
`docker buildx create` command:
```console
$ docker buildx create --driver=docker-container --name=container
```
This creates a new builder with the name `container`. You can list available
builders with `docker buildx ls`.
```console
$ docker buildx ls
NAME/NODE DRIVER/ENDPOINT STATUS
container docker-container
container_0 unix:///var/run/docker.sock inactive
default * docker
default default running
desktop-linux docker
desktop-linux desktop-linux running
```
The status for the new `container` builder is inactive. That's fine - it's
because you haven't started using it yet.
## Build using emulation
To run multi-platform builds with Buildx, invoke the `docker buildx build`
command, and pass it the same arguments as you did to the regular `docker build`
command before. Only this time, also add:
- `--builder=container` to select the new builder
- `--platform=linux/amd64,linux/arm/v7,linux/arm64/v8` to build for multiple
architectures at once
```console
$ docker buildx build \
--target=binaries \
--output=bin \
--builder=container \
--platform=linux/amd64,linux/arm64,linux/arm/v7 .
```
This command uses emulation to run the same build four times, once for each
platform. The build results are exported to a `bin` directory.
```text
bin
├── linux_amd64
│ ├── client
│ └── server
├── linux_arm64
│ ├── client
│ └── server
└── linux_arm_v7
├── client
└── server
```
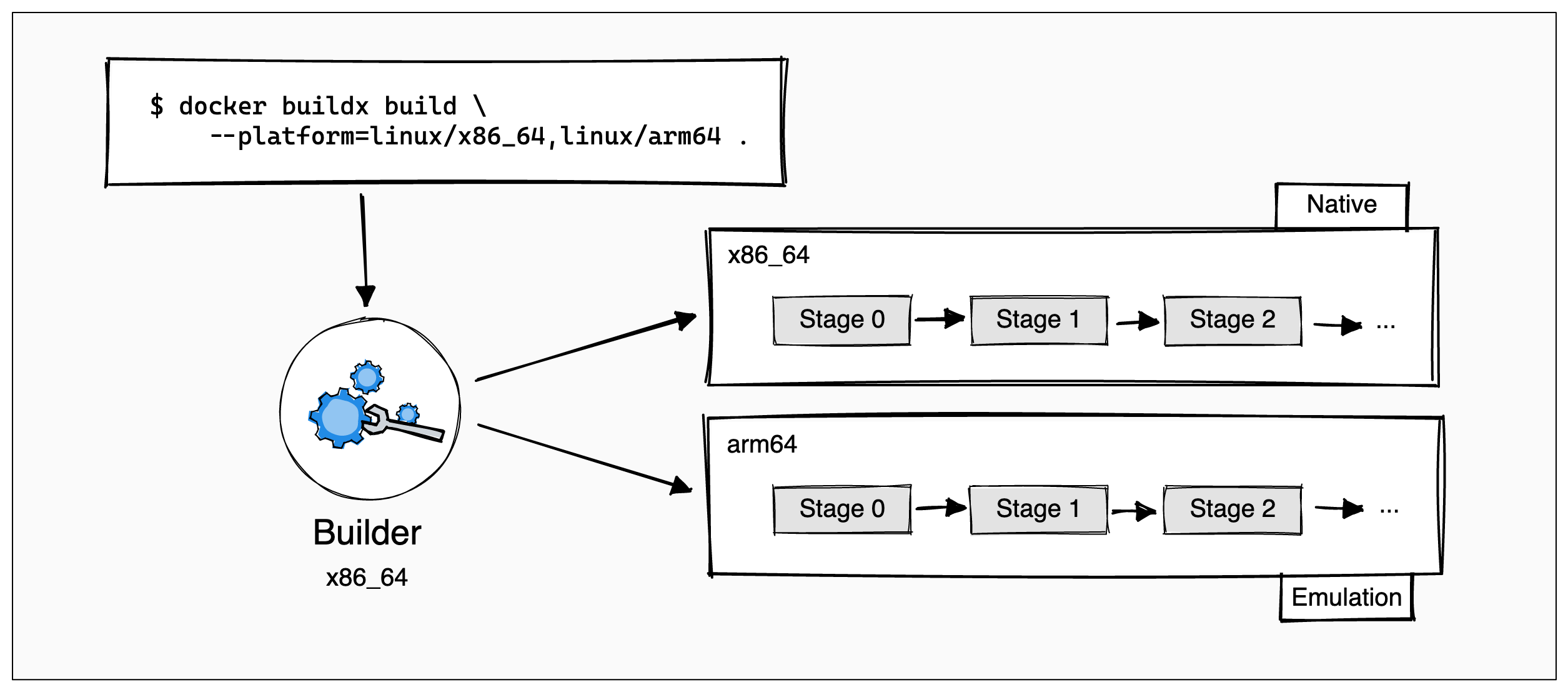
When you build using a builder that supports multi-platform builds, the builder
runs all of the build steps under emulation for each platform that you specify.
Effectively forking the build into two concurrent processes.
{:.invertible}
There are, however, a few downsides to running multi-platform builds using
emulation:
- If you tried running the command above, you may have noticed that it took a
long time to finish. Emulation can be much slower than native execution for
CPU-intensive tasks.
- Emulation only works when the architecture is supported by the base image
you’re using. The example in this guide uses the Alpine Linux version of the
`golang` image, which means you can only build Linux images this way, for a
limited set of CPU architectures, without having to change the base image.
As an alternative to emulation, the next step explores cross-compilation.
Cross-compiling makes multi-platform builds much faster and versatile.
## Build using cross-compilation
Using cross-compilation means leveraging the capabilities of a compiler to build
for multiple platforms, without the need for emulation.
The first thing you'll need to do is pinning the builder to use the node’s
native architecture as the build platform. This is to prevent emulation. Then,
from the node's native architecture, the builder cross-compiles the application
to a number of other target platforms.
### Platform build arguments
This approach involves using a few pre-defined build arguments that you have
access to in your Docker builds: `BUILDPLATFORM` and `TARGETPLATFORM` (and
derivatives, like `TARGETOS`). These build arguments reflect the values you pass
to the `--platform` flag.
For example, if you invoke a build with `--platform=linux/amd64`, then the build
arguments resolve to:
- `TARGETPLATFORM=linux/amd64`
- `TARGETOS=linux`
- `TARGETARCH=amd64`
When you pass more than one value to the platform flag, build stages that use
the pre-defined platform arguments are forked automatically for each platform.
This is in contrast to builds running under emulation, where the entire build
pipeline runs per platform.
{:.invertible}
### Update the Dockerfile
To build the app using the cross-compilation technique, update the Dockerfile as
follows:
- Add `--platform=$BUILDPLATFORM` to the `FROM` instruction for the initial
`base` stage, pinning the platform of the `golang` image to match the
architecture of the host machine.
- Add `ARG` instructions for the Go compilation stages, making the `TARGETOS`
and `TARGETARCH` build arguments available to the commands in this stage.
- Set the `GOOS` and `GOARCH` environment variables to the values of `TARGETOS`
and `TARGETARCH`. The Go compiler uses these variables to do
cross-compilation.
```diff
# syntax=docker/dockerfile:1
ARG GO_VERSION={{site.example_go_version}}
ARG GOLANGCI_LINT_VERSION={{site.example_golangci_lint_version}}
- FROM golang:${GO_VERSION}-alpine AS base
+ FROM --platform=$BUILDPLATFORM golang:${GO_VERSION}-alpine AS base
WORKDIR /src
RUN --mount=type=cache,target=/go/pkg/mod \
--mount=type=bind,source=go.mod,target=go.mod \
--mount=type=bind,source=go.sum,target=go.sum \
go mod download -x
FROM base AS build-client
+ ARG TARGETOS
+ ARG TARGETARCH
RUN --mount=type=cache,target=/go/pkg/mod \
--mount=type=bind,target=. \
- go build -o /bin/client ./cmd/client
+ GOOS=${TARGETOS} GOARCH=${TARGETARCH} go build -o /bin/client ./cmd/client
FROM base AS build-server
+ ARG TARGETOS
+ ARG TARGETARCH
RUN --mount=type=cache,target=/go/pkg/mod \
--mount=type=bind,target=. \
- go build -o /bin/server ./cmd/server
+ GOOS=${TARGETOS} GOARCH=${TARGETARCH} go build -o /bin/server ./cmd/server
FROM scratch AS client
COPY --from=build-client /bin/client /bin/
ENTRYPOINT [ "/bin/client" ]
FROM scratch AS server
COPY --from=build-server /bin/server /bin/
ENTRYPOINT [ "/bin/server" ]
FROM scratch AS binaries
COPY --from=build-client /bin/client /
COPY --from=build-server /bin/server /
FROM golangci/golangci-lint:${GOLANGCI_LINT_VERSION} as lint
WORKDIR /test
RUN --mount=type=bind,target=. \
golangci-lint run
```
The only thing left to do now is to run the actual build. To run a
multi-platform build, set the `--platform` option, and specify a CSV string of
the OS and architectures that you want to build for. The following command
illustrates how to build, and export, binaries for Mac (ARM64), Windows, and
Linux:
```console
$ docker buildx build \
--target=binaries \
--output=bin \
--builder=container \
--platform=darwin/arm64,windows/amd64,linux/amd64 .
```
When the build finishes, you’ll find client and server binaries for all of the
selected platforms in the `bin` directory:
```diff
bin
├── darwin_arm64
│ ├── client
│ └── server
├── linux_amd64
│ ├── client
│ └── server
└── windows_amd64
├── client
└── server
```
## Summary
This section has demonstrated how you can get started with multi-platform builds
using emulation and cross-compilation.
Related information:
- [Multi-platfom images](../building/multi-platform.md)
- [Drivers overview](../drivers/index.md)
- [Docker container driver](../drivers/docker-container.md)
- [`docker buildx create` CLI reference](../../engine/reference/commandline/buildx_create.md)
You may also want to consider checking out
[xx - Dockerfile cross-compilation helpers](https://github.com/tonistiigi/xx){: target="_blank" rel="noopener" }.
`xx` is a Docker image containing utility scripts that make cross-compiling with Docker builds easier.
## Next steps
This section is the final part of the Build with Docker guide. The following
page contains some pointers for where to go next.
[Next steps](next-steps.md){: .button .primary-btn }