Signed-off-by: jike5 <2719825969@qq.com> Signed-off-by: jike5 <2719825969@qq.com> Signed-off-by: jike5 <2719825969@qq.com> Signed-off-by: jike5 <2719825969@qq.com> Signed-off-by: jike5 <2719825969@qq.com> |
||
|---|---|---|
| .. | ||
| build | ||
| images | ||
| scripts | ||
| README.md | ||
| cloud-deployment.yaml | ||
| edge-deployment.yaml | ||
README.md
Implement VSLAM algorithm based on KubeEdge
This project aims to develop a Visiual SLAM application on an edge-side robot and implementing compute offloading to reduce the compute and memory resource pressure on edge-side.
Prerequisites
- Kubeedge 1.10.1+
- Edgemesh 1.11.0+
Steps to reproduce
-
Make sure your cluster is set up and edgemesh is enabled.
-
Clone the community/sig-robotics respository.
git clone https://github.com/kubeedge/community -
Prepare your RGBD dataset or RGBD-sensors on the edge-side.
We use TUM Datasets and its format in our development and test process.
-
With all nodes running on the cluster, we create the deployment by using the yaml file below.
For example, we have a cloud node and two edge nodes, named edge01 and edge02
cloud-deployment.yamlspec: template: spec: nodeName: edge02edge-deployment.yamlspec: template: spec: nodeName: edge01Download TUM Datasets to your edge node, and mount it within k8s.
spec: template: spec: - name: data-mount hostPath: path: [your_absolute_path]/workspace/data -
Make sure you have replace the
PATH_TO_SEQUENCE_FOLDER,ASSOCIATIONS_FILEin edge-deployment.yaml andTUN_NAMEin cloud-deployment.yamlto your own parameters.env: - name: PATH_TO_SEQUENCE_FOLDER value: /workspace/data/YOUR_DATA_FOLDER - name: ASSOCIATIONS_FILE value: /workspace/Edgeslam/Examples/RGB-D/YOUR_CONFIG.yamlenv: - name: TUM_NAME value: TUM2 -
Create the applications deployment.
kubectl apply -f edge-deployment.yaml kubectl apply -f cloud-deployment.yaml -
If your edge-side node support X11 GUI, you will see a frame windows and a map window. The trajectory will be saved under
/workspace/edgeslam/Examplesfolder.
Validation
The works we has used for reference including ORB_SLAM2, and combined the performance on TUM datasets. We illustrate the overall framework of ours in the chart and figures.
| RMSE | ORBSLAM2 | Ours |
|---|---|---|
| fr2_desk | 0.05 | 0.12 |
| fr3_office | 0.02 | 0.04 |
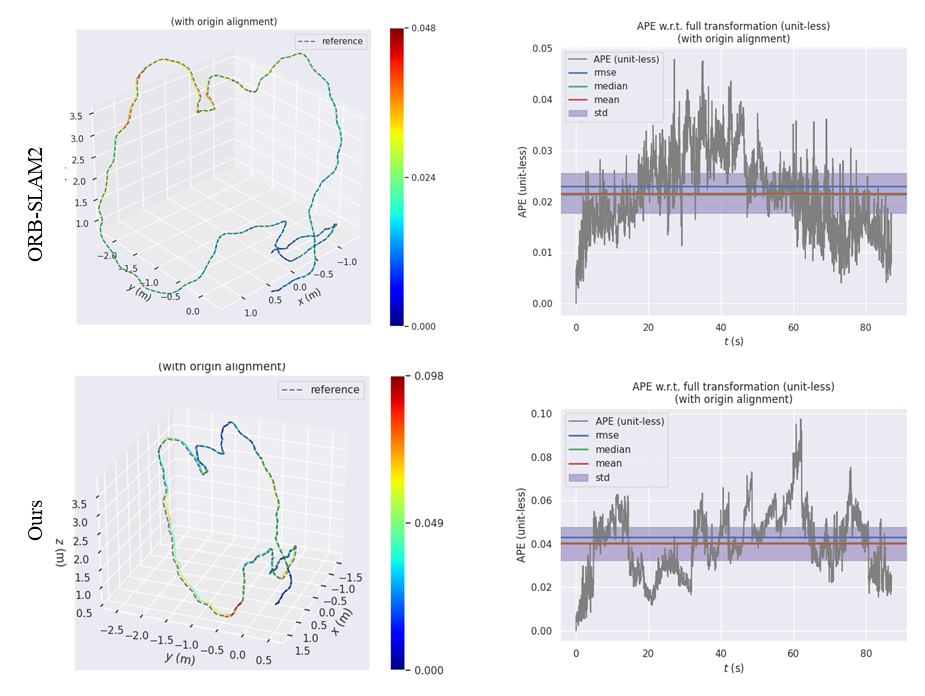
Conclusion: Through the cloud-edge collaboration, the computational pressure on edge devices is reduced while ensuring better localization accuracy results.
Development Tools
Due to the different application scenarios of robots, for cases that customer require, we provide some tools and environments to accelerate development process.
You can locally build a mutually isolated cloud and side container. To simulate edgemesh network communication, we need to first define a docker-network:
docker network create orbslam-cloud
Start the containers:
sudo ./scripts/run_container_cloud.sh
sudo ./scripts/run_container_edge.sh